文献情報
| タイトル | |
|---|---|
| 接触コミュニケーションとしての甘噛みの実装と評価 | |
| 著者 | |
|
|
| アブストラクト | |
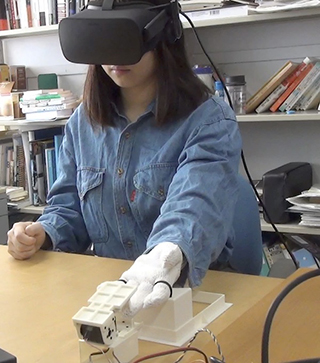
本研究は,接触コミュニケーションのひとつとして「甘噛み」するロボットの開発を目指し,噛み方と見た目を検討するためのシステムの実装および予備調査を行った.甘噛みは,言葉の話せない乳幼児やペットに見られる行為であり,噛まれる側はその行為から甘えや信頼,苛立ちなど,様々な感情を見いだし,親密な関係性を構築する.接触行為は,人とロボットのコミュニケーションにおいてポジティブな効果があることが示されているが,噛まれることは非常に無防備な行為であるため,不快な印象に陥る可能性も高い.そこで,適切な甘噛みを実現するために,手を噛むデバイスおよびバーチャルエージェントを試作し,噛み方と見た目に関する予備調査を行った.その結果,見た目と噛み方のギャップが大きいと,必ずしも適切な甘噛みの印象を与えない可能性が示唆された. |
|
| 雑誌名 | |
| インタラクション2019論文集 © 情報処理学会 2019 |
|
| 論文ID | |
| 1B-36 | |
| ページ | |
| 323-327 | |
| 発行日 | |
| 2019年2月27日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |