文献情報
| タイトル | |
|---|---|
| 仮想物体への接触感を高める先端伸縮型デバイスの試作 | |
| 著者 | |
|
|
| アブストラクト | |
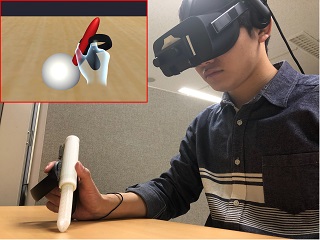
VR(Virtual reality; 人工現実)空間では,実世界と同様の動きでモデリングやペインティングといった作業を行うことができる.しかし,VR空間では視覚情報に比べて,触覚情報の再現が十分ではない.そのため,実世界とVR空間内で感覚のずれが生じ,実世界での経験を活かしてVR空間内で作業を行うことは難しい.そこで,本研究では,物体の形状認識に必要な反力を提示する手法の提案とその手法を実現するためのデバイスの開発を行う. |
|
| 雑誌名 | |
| インタラクション2019論文集 © 情報処理学会 2019 |
|
| 論文ID | |
| 1B-48 | |
| ページ | |
| 377-378 | |
| 発行日 | |
| 2019年2月27日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |