文献情報
| タイトル | |
|---|---|
| 手遊びや影絵に基づく操作が可能なロボットの組み立てプラットフォームとその実演・評価 | |
| 著者 | |
|
|
| アブストラクト | |
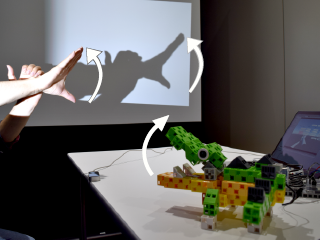
本稿では,手遊びや影絵に基づくハンドジェスチャでロボットのリアルタイム操作を行うプラットフォームを提案する.手指の動きをセンサで計測し,それをロボットの動きに反映させる.ロボットはユーザがブロックを使って組み立てることができる.ロボットを操作するために,ロボットの関節に手指の動かし方を示すためのブロックを接続し,マウス・トラックパッドでロボットと手指の関節可動範囲を対応づける.イベントで体験会・ワークショップを実施し,ロボットの操作は200名以上が体験し,ロボットの組み立てと操作には19名が参加した.これにより,提案手法が直感性のある操作であること,リアルタイムに操作できるロボットを子供でもデザインできることを確認した. |
|
| 雑誌名 | |
| インタラクション2019論文集 © 情報処理学会 2019 |
|
| 論文ID | |
| INT19011 | |
| ページ | |
| 92-101 | |
| 発行日 | |
| 2019年2月27日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |