文献情報
| タイトル | |
|---|---|
| 複数の自走壁型プロップを用いたルームスケールVRの空間インフラの遭遇型触覚提示 | |
| 著者 | |
|
|
| アブストラクト | |
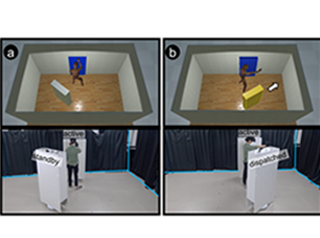
本研究は,複数の自走する壁型プロップを用いて,ルームスケールVRの空間インフラ(壁やドア等の空間の構造を決める境界)に関する触覚をユーザに提示する方法について検討する.システムはHMDを装着したユーザの位置や動きを計測し,その情報からユーザが触れようとしているVR内の壁面を予測する.その予測に従って,システムは2枚又は3枚の壁型プロップをユーザがその壁面に到達する前に自動的に配置し,ユーザに壁面の触覚フィードバックを提示する.本研究では,単純な4つの壁に囲まれた部屋を題材として取り上げ,シミュレータによって,提案する予測アルゴリズムが遅延なく壁型プロップを配置できる可能性を示した.また,実機を用いたユーザスタディにより,提案手法は,ユーザの歩行速度を制限すれば,限られた速度のモバイルロボットでもユーザに遅延なく触覚を提供でき,没入感や体験の質を向上させることが分かった.今回の様々な探索をもとにして,今後のルームスケールVRの遭遇型触覚提示システムの開発に向けた示唆および課題をまとめる. |
|
| 雑誌名 | |
| インタラクション2020論文集 © 情報処理学会 2020 |
|
| 論文ID | |
| INT20014 | |
| ページ | |
| 123-132 | |
| 発行日 | |
| 2020年3月2日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |