文献情報
| タイトル | |
|---|---|
| 再構成可能な腱駆動モジュラーソフトロボット | |
| 著者 | |
|
|
| アブストラクト | |
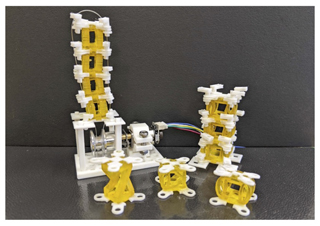
モジュラーロボットは,容易に再構成できるという点で優れている.モジュラーロボットを従来の硬い材料だけではなく柔らかい材料と組み合わせて作ることで,しなやかな動きが出来るようになり,人と同じ空間で使用することも可能になる.そこで本研究では腱駆動アクチュエータを用いて再構成可能なモジュラーソフトロボットを作製した.モジュールはゴムライク樹脂を用いて「曲げ」「圧縮」「ひねり」のいずれかの変形が起きやすいように作製した.さらに用いるモジュールの個数及び組み合わせを変えることで一方向に曲がるモジュラーソフトロボットや螺旋状に曲がるモジュラーソフトロボットなどが作製可能であることが分かった. |
|
| 雑誌名 | |
| インタラクション2022論文集 © 情報処理学会 2022 |
|
| 論文ID | |
| 2D04 | |
| ページ | |
| 268-271 | |
| 発行日 | |
| 2022年2月21日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |