文献情報
| タイトル | |
|---|---|
| 歩容と歩行位置の変化に対応した機械学習による歩行速度推定を行うトレッドミル型ロコモーションインタフェースの開発 | |
| 著者 | |
|
|
| アブストラクト | |
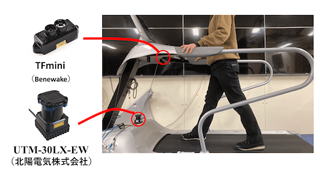
概要:本研究では,VR空間を自由に歩き回れるインタフェースとして,誰がどんな速度で歩行しても歩行者を一定位置に留める事ができるトレッドミル型のロコモーションインタフェースの開発を行う.今回我々は,歩行者の歩容を光学センサで取得し,歩行速度を推定する手法を採用した.先行研究では立脚時間から歩行速度の推定を行ったが,歩行者の歩容によっては正確な立脚時間が計測できなかった.そして新しい手法として,歩容データを時系列順に連結した学習用データを用い機械学習による学習モデルを構築することで約99%の精度で速度識別が可能となった.本稿では学習モデルの汎用性を高めるために,歩容と歩行位置の変化に対応した学習モデルの構築を行った. |
|
| 雑誌名 | |
| インタラクション2022論文集 © 情報処理学会 2022 |
|
| 論文ID | |
| 4P04 | |
| ページ | |
| 613-617 | |
| 発行日 | |
| 2022年2月21日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |