文献情報
| タイトル | |
|---|---|
| 人間とロボットの情動インタラクションにおける適応的引き込み制御と学習 | |
| 著者 | |
|
|
| アブストラクト | |
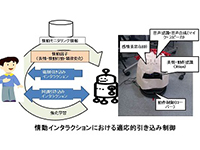
本研究では、コミュニケーションロボットの動きの大きさ、パターン、タイミングなどパラメータの変化や、模倣、揺らぎを与えた模倣を行うことで共感や同調を引き起こさせ、引き込み制御を行う。引き込み制御において強化学習を行った場合と行わなかった場合にどちらがより効率的に引き込み制御を行えるかを検証する |
|
| 雑誌名 | |
| インタラクション2014論文集 © 情報処理学会 2014 |
|
| 論文ID | |
| A3-0 | |
| ページ | |
| 232 ~ 233 | |
| 発行日 | |
| 2014年2月20日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |