文献情報
| タイトル | |
|---|---|
| 伸縮による抵抗変化を利用した組紐センサの基礎検討 | |
| 著者 | |
|
|
| アブストラクト | |
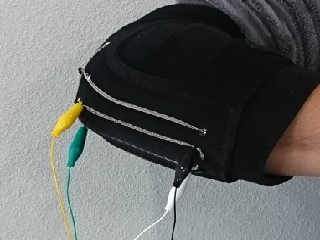
ウェアラブル生体情報計測で衣類へのセンサを組み込む場合において,布や糸そのものでセンサ機能を実現する手法が衣類の特徴を損なうことなく,また,既存の製品作成手順から大きく乖離せずにセンサ機能を組み込めることから,発展が期待されている.本稿では,新たに開発した組紐をベースとした伸縮センサの基礎検討結果について報告する.本センサは伸縮によって抵抗値が変化し,旧来の布をベースとした伸縮センサと異なり,細身であるために,計測部位に複数本を並行配置することも可能である.それらの計測結果を結合することで,衣類型センサの課題の一つである位置ずれ問題に対応できる可能性がある.本基礎検討では,モーションキャプチャを正値として,組紐センサの出力値から伸縮量や関節角度を推定し,性能を検討した.単純な伸縮については,最小二乗誤差4.58±0.37mmであり,変化量約40mmに対して,11.25±0.3%で推定できた.肘サポータと着圧型ウェアの肘部に組紐センサを取り付け,肘関節角度を測定した結果では,肘サポータで最小二乗誤差16.88±2.74度,着圧型ウェアで37.88±28.53度で推定できた.また,複数本のセンサを併用することで,着圧型ウェアの精度を37.88±28.53度の精度から26.42±4.88度まで改善できた. |
|
| 雑誌名 | |
| インタラクション2016論文集 © 情報処理学会 2016 |
|
| 論文ID | |
| 1C58 | |
| ページ | |
| 396-401 | |
| 発行日 | |
| 2016年2月24日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |