文献情報
| タイトル | |
|---|---|
| 没入型インタフェースを伴うクラウド仮想環境におけるHRIに基づく場所の学習 | |
| 著者 | |
|
|
| アブストラクト | |
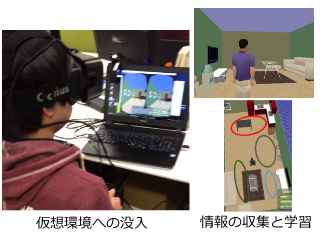
介護や案内といった,人の生活支援を行うロボットの需要が近年増加している.このようなロボットは,活動環境を構成する場所の領域と,その領域を表現する語彙の知識を獲得する必要があると考えられる.本研究では,この場所に関する知識を場所の概念とし,仮想環境において収集したマルチモーダル情報から場所の概念を形成するクラウド概念学習システムを構築する.本稿では,人間の代替となるアバターの追加や仮想環境への没入等の,ヒューマンロボットインタラクションの面におけるシステムの改良を報告する. |
|
| 雑誌名 | |
| インタラクション2017論文集 © 情報処理学会 2017 |
|
| 論文ID | |
| 2-501-10 | |
| ページ | |
| 429-433 | |
| 発行日 | |
| 2017年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |