文献情報
| タイトル | |
|---|---|
| 柔らかい双方向の抱擁コミュニケーションを目指したハグロボットの開発 | |
| 著者 | |
|
|
| アブストラクト | |
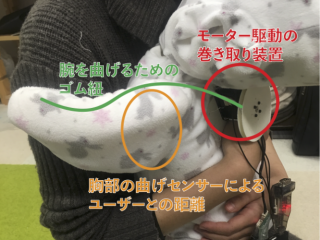
人間を含め接触的な行為で安心感を得る生物は多く,柔らかさを重要視したセラピー向けのロボットも多く開発されている.また,抱擁(ハグ)する行為はあらゆる文化で普遍的なコミュニケーションの一つである.本研究では,柔らかな接触と抱擁を実現するために電磁モータとゴムを使った柔らかい抱擁システムと,接触センサを使うことによって人から抱擁があったときにロボットからも抱擁を行う双方向的な抱擁コミュニケーションシステムを実装したハグロボットを提案する. |
|
| 雑誌名 | |
| インタラクション2018論文集 © 情報処理学会 2018 |
|
| 論文ID | |
| 2A13 | |
| ページ | |
| 571-572 | |
| 発行日 | |
| 2018年2月26日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |