文献情報
| タイトル | |
|---|---|
| 仮想世界に置けるアイテムの透過的な利用のための3次元物体のリアルタイムトラッキング | |
| 著者 | |
|
|
| アブストラクト | |
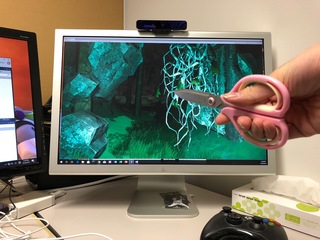
今日,モーションセンサーデバイスの登場により,人間の体や手の動作を容易に認識することができるようになった.しかしそれらは,事前に人間のスケルトンデータや動作を定義しているため,トラッキング対象が一意的であり人間以外の物体の動作を認識することができない.そこで本研究は,事前に対象の物体の情報を定義せずに,リアルタイムに対象の物体のスケルトンデータを取得する.そのために対象の物体の関節の位置を認識する.まずセンサーカメラを用いて距離画像を取得し,コンピュータビジョンを用いて物体の形状の解析を行う.そこで解析された情報をもとにコンピュータビジョンと3次元点群処理を用いて動作点と支点を識別する.また得られたスケルトンデータを用いて対象の物体のボーントラッキングを行う. |
|
| 雑誌名 | |
| インタラクション2018論文集 © 情報処理学会 2018 |
|
| 論文ID | |
| 2B19 | |
| ページ | |
| 594-598 | |
| 発行日 | |
| 2018年2月26日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |