文献情報
| タイトル | |
|---|---|
| 掌を使った把持操作を可能にする7自由度ワイヤ駆動型力覚提示装置の試作 | |
| 著者 | |
|
|
| アブストラクト | |
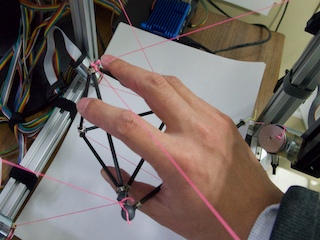
本研究では,掌を使った把持操作を実現する7自由度ワイヤ駆動型力覚提示装置の提案を行う.合計8本のワイヤにより,エンドエフェクタの並進・回転の6自由度の力覚提示のみならず,掌を使った把持操作を追加の1自由度として合計7自由度の力覚提示を実現することを目的とする.実際に試作機の製作を行い剛体物理シミュレーションにより構築されたVR空間において,把持を伴う剛体操作のVR環境の構築を行った. |
|
| 雑誌名 | |
| インタラクション2021論文集 © 情報処理学会 2021 |
|
| 論文ID | |
| 3B04 | |
| ページ | |
| 529-530 | |
| 発行日 | |
| 2021年3月1日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |