文献情報
| タイトル | |
|---|---|
| ハンドモデルの指先変形を用いて硬さを表現する疑似触覚の提案 | |
| 著者 | |
|
|
| アブストラクト | |
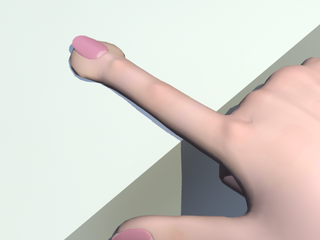
本研究では,Pseudo-Haptics(疑似触覚)の一つとしてVR空間内で仮想物体に触れた際にハンドモデルの指先変形により仮想物体への硬さを疑似的に知覚すること目的とする.本実験では,実験参加者が指先の変形度合いが異なる3種類のハンドモデルを用いて仮想物体に触れ,硬さの知覚に影響があるかどうかを調査した.実験の結果,指先が変形するハンドモデルが硬さを明確に知覚させることはできなかったが,硬さの疑似触覚を知覚させる可能性を示した. |
|
| 雑誌名 | |
| インタラクション2023論文集 © 情報処理学会 2023 |
|
| 論文ID | |
| 1B-43 | |
| ページ | |
| 307-310 | |
| 発行日 | |
| 2023年3月1日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |