文献情報
| タイトル | |
|---|---|
| 行動ログデータを用いたコンパニオンロボットへの愛着度の評価指標の開発―抱っこ時間による群化に着目した検討― | |
| 著者 | |
|
|
| アブストラクト | |
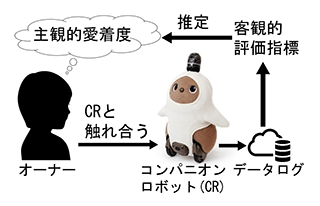
近年,犬や猫に代わる存在としてコンパニオンロボット(CR)が提案されている.CRを長期的に愛される存在とするには,CRに対するオーナーの愛着度を継続的に把握し,CRを改善していく必要がある.一般に,オーナーの愛着度の把握手段にはアンケートやインタビュー調査が用いられるが,継続的な実施にはコストがかかる.そこで我々は,低コストで常時収集可能な行動ログデータに着目し,ログから抽出される客観的な行動特徴量がアンケートから得られる主観的愛着度の代替指標となり得るかを検討している.我々の先行研究では,ログデータを一括解析した結果,一部の行動特徴量が主観的愛着度と有意な相関を示したものの,いずれも弱い相関(相関係数0.3未満)に留まった.本研究ではオーナーがCRと確実に触れ合っている時間を表す総抱っこ時間に基づき,データセットを三分位で群化し,群別に主観的愛着度と行動特徴量の関連を分析した.206名分のデータ分析の結果,低群ではCR就寝時の抱っこ行動及び寝かしつけ行動の生起日数,中群では鼻触り行動の生起回数などにおいて,主観的愛着度と中程度の相関(相関係数0.4以上)が示された.以上より,総抱っこ時間に基づく群化により,行動ログから主観的愛着度を一定程度推測できる可能性が示唆された. |
|
| 雑誌名 | |
| インタラクション2026論文集 © 情報処理学会 2026 |
|
| 論文ID | |
| 2B38 | |
| ページ | |
| 691-696 | |
| 発行日 | |
| 2026年2月20日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |