文献情報
| タイトル | |
|---|---|
| 歩行者と歩道を共用する環境で円滑な交通を実現するための自動配送ロボットのデザイン検討 | |
| 著者 | |
|
|
| アブストラクト | |
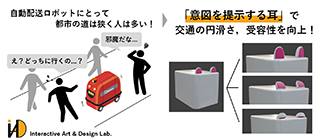
物流業界の人手不足解消に向けて,ラストワンマイルを担う重要なピースとして自動配送ロボットの導入が進んでいる.しかし,現状はロボットの挙動意図が伝わらず歩行者との間で膠着状態や不快感を生じさせるという問題点がある.そこで本研究では,歩行者と共存する自動配送ロボットの円滑な走行を実現するための情報提示手法を提案する.まず提案1として,進行方向を提示する耳型装置を搭載し評価実験したところ,提示しない場合に比べ進路の予測が有意に容易になるが,ウインカと同程度であり,受容性の向上には予測可能性が強く影響することがわかった.そこで提案2として,アニメーション制作における「予備動作」と「伸縮」の表現を耳型装置の動作に応用するデザインを提案し,VRシミュレーションによって評価した.その結果,待機や発進の意図は非言語的かつ直感的に伝達可能であることが確認された.一方で,進路譲歩の要求については,単発の動作では周囲への関心提示と誤認される可能性が示された. |
|
| 雑誌名 | |
| インタラクション2026論文集 © 情報処理学会 2026 |
|
| 論文ID | |
| 2B55 | |
| ページ | |
| 761-765 | |
| 発行日 | |
| 2026年2月20日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |