文献情報
| タイトル | |
|---|---|
| ロボット支援手術動画からの転移学習による顕微鏡縫合の熟練度推定と時系列可視化 | |
| 著者 | |
|
|
| アブストラクト | |
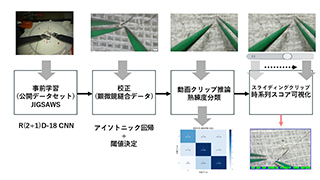
本研究は,顕微鏡縫合の学習者に自身の能力を客観的に把握できるフィードバックを与える学習支援を目的として,少ない訓練動画からでも顕微鏡縫合の熟練度(初心者/中級者/上級者)をAIで高精度に評価する枠組みを提案する.医療分野では特定タスクの大規模な学習データを集めることが困難という課題に対し,公開されているロボット支援手術の動画データセット「JIGSAWS」で事前学習したモデルを顕微鏡縫合タスクに転移させることで対応した.動画を複数のクリップに分割してスコアを算出し,アイソトニック回帰で補正後に3クラスの熟練度に分類を行う.検証の結果,本手法は顕微鏡縫合データを用いてゼロから学習させた場合や,一般的な動作動画データで事前学習済みのモデルから顕微鏡縫合データで学習させた場合と比較して最も高い精度(Accuracy=0.75, QWK=0.679)を達成した.これにより,関連分野のデータを用いた転移学習が,少数のデータセットにおける技能評価の精度向上に有効であることが示された.また,技能レベルを時系列で可視化するヒートマップも作成したが, 医師のレビューにより,非動作区間の扱いや微細な動きの認識など信頼性に改善の余地があることも明らかになった. |
|
| 雑誌名 | |
| インタラクション2026論文集 © 情報処理学会 2026 |
|
| 論文ID | |
| INT26009 | |
| ページ | |
| 61-69 | |
| 発行日 | |
| 2026年2月20日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |