文献情報
| タイトル | |
|---|---|
| インタラクティブな解軌道観察の可能な教育用慣性ロータ型倒立振子実験教材 | |
| 著者 | |
|
|
| アブストラクト | |
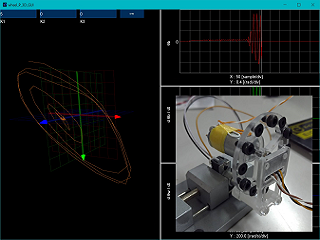
本稿では,現代制御理論の学習支援を目的とし,状態空間における解軌道を実働状態でグラフィカルかつインタラクティブに観察できる慣性ロータ型倒立振子実験教材の提案と実装について述べる.慣性ロータはロボットや人工衛星等の姿勢制御にも用いられ実用性が高く,その倒立動作も視覚的な面白さを持っているため,現代制御理論を学ぶ教材として優れている.本教材は倒立振子と制御用ボード,および実働状態で制御パラメータ変更や状態空間の解軌道を観察できるホストPC側のアプリケーションからなる.本教材により,学習者は振子の実働状態でインタラクティブにパラメータ変更や解軌道の観察が行え,現代制御理論の理解を深めることができる.また小型・安価な部品で構成されているため,多人数の実験授業においても学習者個々人に配備し易い. |
|
| 雑誌名 | |
| インタラクション2022論文集 © 情報処理学会 2022 |
|
| 論文ID | |
| 1D19 | |
| ページ | |
| 206-209 | |
| 発行日 | |
| 2022年2月21日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |