文献情報
| タイトル | |
|---|---|
| バーチャルハンドの指先の細さが適応的に変化するシステムの提案 | |
| 著者 | |
|
|
| アブストラクト | |
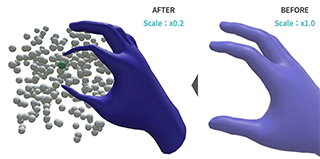
R環境では, ユーザの手を直接用いた直感的な物体操作手法が一般的に用いられている. 一方で,高密度に配置された微小物体を選択する際には, 自己遮蔽や指の太さによる選択の曖昧さが操作を困難にしている. 本研究ではこの課題に対し, 対象との距離および手の移動速度に応じて, 指先の細さを適応的に変化させる手法を提案する. 本手法により, 接触判定領域を視覚的かつ物理的に局所化することで, 密集したターゲットへのピンポイントな選択を可能にし, 精密操作を支援することを目指す |
|
| 雑誌名 | |
| インタラクション2026論文集 © 情報処理学会 2026 |
|
| 論文ID | |
| 2A05 | |
| ページ | |
| 548-550 | |
| 発行日 | |
| 2026年2月20日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |